BLADE-SPACE Governance Node
BLADE-SPACE = Beam-Layer Authority for Directed Engagements, Space-Edge Node
A radiation-tolerant, hot-redundant orbital governance node that serves as the ethical decision-making authority for autonomous LEO platforms, determining in real-time whether systems should EXECUTE, DELAY, ABORT, or enter CARA safe-mode based on multi-sensor trust consensus - operating beyond ground-loop latency.
Preliminary Design Phase (TRL 2-3) · 15-Document Engineering Package · DOI 10.5281/zenodo.20183269This is NOT a weapon. It is a space-qualified governance layer - a radiation-tolerant, hot-redundant hardware-enforced ethical checkpoint between autonomous orbital platforms and authority-gated actions (propulsive maneuvers, payload firing, rendezvous-proximity operations). The platform extends DoD Directive 3000.09 and human-judgment governance into the space domain, beyond ground-loop latency.
Key Contributions
- First reference design extending the AUTHREX authority-governance stack into the orbital domain (TRL 2-3 Preliminary Design Phase)
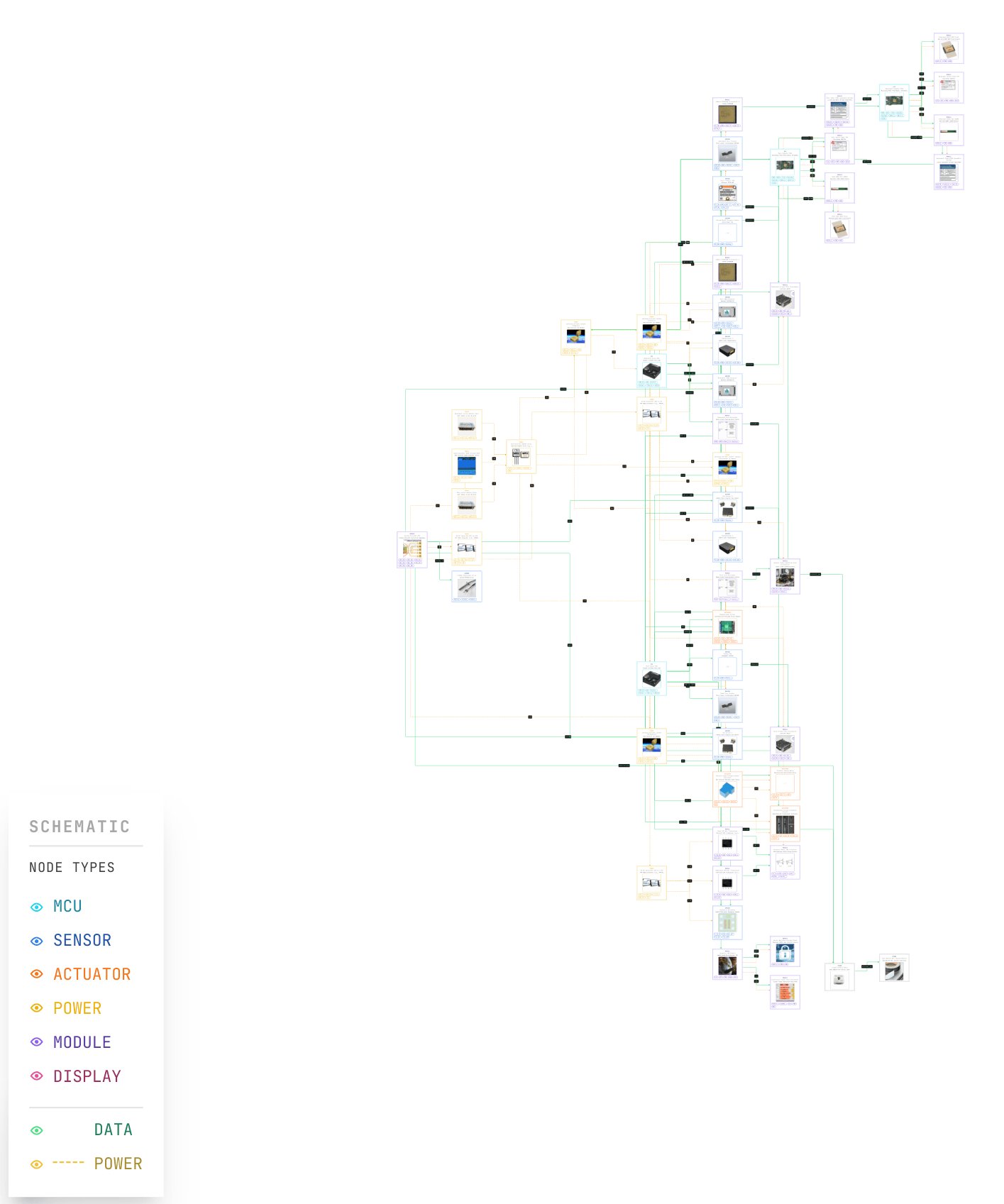
- Complete 9-stage governance pipeline (SATA → ADARA → IFF → HMAA → MAIVA → FLAME → CARA → BDA → EFFECTOR) on radiation-tolerant compute
- Hot-redundant compute architecture: Microchip RTG4 FPGA (primary + backup) + Aitech S-A1760 Venus SBC (primary + backup) with <200 ms failover
- Three-fault-tolerant payload/thruster firing path: two independent normally-open solid-state relays + pyrotechnic isolation
- ECDSA-anchored audit chain: P-256 keypair in rad-tolerant TPM, hash continuity across reboots and brown-outs
- ADARA multi-constellation GNSS cross-correlation for spoofing detection (primary + backup NovAtel OEM7600-RG receivers)
- 30 krad TID design behind 3 mm Al equivalent shielding; LEO 400-1200 km, 5-year design life (7-year stretch)
- 91-component BOM, $505,440 reference cost, 11.0 kg estimated mass (12.0 kg allocation), 134 W nominal / 193 W peak on 28V bus
Engineering Package: 15 engineering design documents in blade-space-repo.zip - System Requirements Document (25 traceable requirements), Requirements Traceability Matrix, FMEA (35 failure modes, 7 catastrophic), Hazard Analysis (10 hazards, 3 critical with three-fault-tolerant mitigations), V&V Plan (20-test campaign), Power / Mass / Thermal Budgets, 11 Interface Control Documents, Reliability Analysis, Radiation Analysis (30 krad TID, SEU/SEE), Assembly & Integration Plan, Configuration Management Plan. Published on Zenodo: DOI 10.5281/zenodo.20183269.