Burak Oktenli
Developing governance architectures intended to enable safe, accountable, and controllable deployment of autonomous systems in critical infrastructure, national security, and safety-critical autonomous environments. These architectures function as control layers governing how authority is granted, restricted, and recovered within autonomous systems. This work focuses on authority lifecycle control, decision integrity, and fail-safe recovery mechanisms that maintain human oversight in high-speed human-machine environments.
This research integrates physical testbeds, simulation platforms, and formal architectural design.
Research status: All seven patent applications are provisional (no patent granted or examined). All 40 publications are open-access preprints or published papers. All hardware platforms are research demonstrators at TRL 2-4, not commercial products.
Here's the right starting point.
This site serves different audiences with different needs. Pick the role that best describes you.
Research Mission
The Problem. Autonomous systems in defense and civilian transportation make decisions faster than humans can intervene, yet no standardized architecture enforces real-time authority governance. DoD Directive 3000.09 requires human control over autonomous weapons but lacks a technical enforcement mechanism. Nearly 40,000 Americans die annually in traffic crashes; NHTSA has documented 1,429 AV incidents (2021-2025); and the SELF DRIVE Act of 2026 (H.R. 7390) now mandates cybersecurity plans for "false vehicle control commands", but no validated reference architecture exists to implement these requirements.
The Gap. Policy frameworks (NIST AI RMF) establish principles but do not enforce them in hardware. Planning-layer safety systems (Mobileye RSS, NVIDIA SFF, SOTIF) constrain behavior but do not govern whether commands reach actuators. Software-only monitors can be bypassed. What is missing: a hardware-enforced architectural layer that continuously evaluates sensor trust, computes graded authority, enforces deliberation windows, and cuts actuator authority through a fail-safe when trust degrades, deterministically, in real-time, without firmware involvement.
My Contribution. Seven governance architectures managing the full authority lifecycle: trust evaluation, authority computation, command gating, consensus, deliberation, deception detection, and recovery:
- SATA: Sensor trust attestation using weighted Dempster-Shafer fusion with cross-sensor validation (Patent: U.S. Provisional 64/002,453)
- HMAA: Four-level authority computation (A3-A0) with asymmetric hysteresis: immediate downgrade, 5-15s delayed upgrade (Patent: 63/999,105)
- CARA: Deterministic GREP-phase recovery: Govern → Restrict → Execute → Persist, with mutual exclusion (Patent: 64/000,170)
- MAIVA: Byzantine fault-tolerant multi-agent consensus with CUSUM-augmented anomaly detection
- FLAME: Mandatory deliberation windows preventing safety-critical actions without sustained authority (Patent: 64/005,607)
- ADARA: Adversarial deception detection computing P(adversarial) from cross-sensor consistency and temporal anomalies
- ERAM: Escalation risk quantification for AI-enabled command-and-control decision compression
These are documented in seven U.S. provisional patent submissions, twenty-four DOI-registered Zenodo records (including research papers with full simulation data for the rover testbed, the UAV platform, and the BLADE platform family from BLADE-EDGE through BLADE-FINANCE), and sixteen SSRN papers on AI governance and national security policy. Total: 40 published works with public DOIs and permalinks. The BLADE-SPACE orbital governance node (TRL 2-3 Preliminary Design, NASA SBIR EXPAND.3.S26B aligned) ships with a 15-document engineering package and is published on Zenodo (DOI 10.5281/zenodo.20183269).
Hardware Implementation. Twelve physical platforms demonstrating governance at increasing operational capability:
- Rover Testbed, 37 components, ~$484, SATA-HMAA-CARA pipeline, 350 simulation runs across 7 fault scenarios, TLA+ verified (23,748 states, 8 properties, of which 5 invariants and a liveness property are verified and 2 upgrade-path properties are vacuous at this bound). DOI: 10.5281/zenodo.19143190.
- UAV Platform, 52 components, ~$4,200, MAVLink/HIL bridge for Cube Orange+ integration, 250 simulation runs across 5 adversarial scenarios, Monte Carlo campaign. DOI: 10.5281/zenodo.19128769.
- BLADE-EDGE, 72 components, ~$139K, defense-grade directed-energy weapon governance. Dual Jetson AGX Orin + dual Zynq UltraScale+ FPGA. 9-module pipeline, MIL-STD-810G, hardwired safety interlock relay. DOI: 10.5281/zenodo.19177472.
- BLADE-AV, 62 components, ~$16K, autonomous vehicle drive-by-wire governance. 9-module pipeline, three-leg redundant KILOVAC LEV200 fail-safe relay. ISO 26262 ASIL-D, SAE J3016 L4. 1,200 runs, no observed unsafe authority transitions. DOI: 10.5281/zenodo.19232130.
- BLADE-MARITIME, 84 components, ~$43K, maritime surveillance governance. 9-module pipeline with hydroacoustic sonar, MAD, AIS spoofing detection, and sea-state authority damping. IP68 / MIL-STD-810G. DOI: 10.5281/zenodo.19246785.
- BLADE-INFRA, 92 components, ~$12K, critical infrastructure governance. 9-module pipeline with ICS/SCADA integration (IEC 61850, Modbus, PROFINET). SIL 3 / NERC CIP / FIPS 140-2. DOI: 10.5281/zenodo.19277887.
- BLADE-SPACE, 91 components, ~$505K, orbital governance node (TRL 2-3 Preliminary Design Phase). 9-stage pipeline on rad-tolerant compute (Microchip RTG4 FPGA + Aitech S-A1760 Venus SBC, hot-redundant); LEO 400-1200 km, 30 krad TID, 5-year design life; ECDSA P-256 audit chain; three-fault-tolerant safety interlock. 15-document engineering package. Aligned with NASA SBIR EXPAND.3.S26B. Zenodo DOI 10.5281/zenodo.20183269.
- BLADE-CUAS, counter-UAS authority governance node, ~$43.5K reference BOM (TRL 2-3 hardware / 3-4 simulation). 9-stage AUTHREX pipeline; four-tier HMAA (T3/T2/T1/T0) with federal-SLTT handoff; Dempster-Shafer consensus across radar, RF, EO/IR, Remote ID, LIDAR; ECDSA P-256 court-admissible evidence chain (Fed. R. Evid. 901/902/803(6)). Sixth BLADE platform, ~75% reuse from BLADE-EDGE. Aligned with EO 14305 and the FY26 NDAA Safer Skies Act. Zenodo DOI 10.5281/zenodo.20299604.
- BLADE-AGENT-HSM, agentic-AI hardware root of trust, ~$199 reference BOM (TRL 2-3 silicon / 3-4 emulator). Hardware companion to the AUTHREX-AGENT software shim; non-exportable ECDSA P-256/P-384 keys in a CC EAL6+ secure element; authority-tier state in a TPM 2.0 PCR bank; HKDF per-tool tokens; multi-modal tamper cascade. Five-opcode 64-byte ABI; USB-A stick and M.2 Key-E module. Seventh BLADE platform, first hardware root of trust. Aligned with CISA/NSA/Five Eyes agentic-AI guidance and FY26 NDAA Sections 1513 and 6601. Zenodo DOI 10.5281/zenodo.20299821.
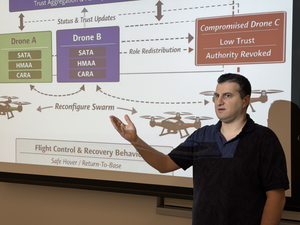
- BLADE-SWARM, attritable swarm authority governance, ~$1,333 per node reference BOM (TRL 3-4 simulator / spec, TRL 2 testbed). Byzantine-fault-tolerant two-phase consensus gated by SATA/HMAA/MAIVA across N=10/50/500 agents; tolerates f=(N-1)/3 compromised agents per quorum with a quorum-intersection bound; per-node ECDSA P-256 root of trust and hash-chained distributed audit ledger; TLA+ verified (5 safety, 3 liveness). Eighth BLADE platform; the multi-agent extension of the HMAA-UAV platform. Aligned with DoDD 3000.09, FY26 NDAA, and the NIST AI RMF. Zenodo DOI 10.5281/zenodo.20351198.
- BLADE-INFRA-OT, authority-governed IT/OT bridge for cross-boundary OT command adjudication, ~1U fanless reference design (TRL 2-3 hardware / 3-4 simulation). Fail-closed, bump-in-the-wire governance appliance at the IT/OT segmentation boundary; AUTHREX adjudicates each cross-boundary command to propagate, hold, or isolate across four OT authority regimes; Xilinx Kria K26 governance plane and x86 network plane; 48 BOM line items, 35 electrical, 42 mechanical; seed-deterministic SHA-256 tamper-evident audit ledger. Ninth BLADE platform; the operational-technology companion to BLADE-INFRA. Aligned with NIST SP 800-82, ISA/IEC 62443, and NERC CIP. Zenodo DOI 10.5281/zenodo.20342067.
- BLADE-FINANCE, authority governance for financial-sector AI decision systems under the U.S. Treasury Financial Services AI Risk Management Framework (TRL 3-4 simulation / TRL 2 hardware). Software-enforced authority-arbitration node; an eight-stage AUTHREX pipeline (VALIDATE through CARA) routes each transaction to autonomous clearance, supervised review, elevated confirmation, or manual hold; four-tier HMAA; a population-state coordination model across account, device, payee, and IP-cluster history; a retrospective stigmergic swarm-review module; SHA-256 canonical-form evidence chain; 36 components, 33 electrical, 32 mechanical, approximately $9,228 BOM. Tenth BLADE platform; first in the economic-security domain. Aligned with the U.S. Treasury FS AI RMF, NIST AI RMF, and EO 14179. Synthetic data only; not deployed in any financial institution. Zenodo DOI 10.5281/zenodo.20374692.
All ten BLADE platforms share the same governance pipeline architecture, demonstrating domain-agnostic portability across defense (DoDD 3000.09), automotive (ISO 26262), maritime (MIL-STD-810G), critical infrastructure (SIL 3 / NERC CIP), orbital (NASA EXPAND.3.S26B alignment), counter-UAS (EO 14305), and agentic AI (CISA/NSA/Five Eyes agentic-AI guidance). Combined across the four flight-relevant published platforms: 2,800+ simulation runs, no observed unsafe authority transitions. BLADE-SPACE is at TRL 2-3 (Preliminary Design); its V&V campaign is specified but not yet executed.
Software Implementation. A companion software authority-governance layer on the AUTHREX Systems venture site extends the same authority pipeline to additional settings, as six reference architectures (TRL 3-4, single-author research, not deployed): AUTHREX-AGENT (agentic AI), AUTHREX-ASSURE (pre-deployment assurance), AUTHREX-ICS-GATE (OT and critical infrastructure), AUTHREX-AGENT-CYBER (cyber-defense, governance only), AUTHREX-SPACECYBER (orbital autonomy), and AUTHREX-SANDBOX (test and evaluation). Several are software companions to the BLADE hardware platforms. AUTHREX-AGENT now has a runnable, test-backed reference implementation, the AUTHREX Governance Kernel, which moves the agent-governance concept from specification to an executable prototype with a passing 85-test suite and verified audit-ledger tamper detection; it remains synthetic-data, single-author research, not deployed.
Simulation and Verification. Nineteen browser-based simulations with seeded PRNG for bit-exact reproducibility. G*Power justified sample sizes, Bonferroni correction, Shapiro-Wilk normality tests. All run client-side with zero dependencies, any reviewer can independently verify results.
Current Status. Independent Researcher based in Washington, DC, pursuing Georgetown University M.P.S. Applied Intelligence (STEM, in progress). B.Sc. Computer Science Engineering (USF, 3.45 GPA). MBA International Business (Lynn, 4.0 GPA). Governance architectures published on Zenodo under CC BY 4.0; ERAM published on SSRN. Next-phase: physical validation, TLA+/UPPAAL formal verification, ROS 2/Gazebo HIL testing, and ASIL-D certification pathway. This research program is informed by progressive professional experience across data governance, infrastructure security, and critical infrastructure systems, see Professional Background below, and sustained engagement with the defense, aerospace, and AI communities through industry conferences and professional societies.
Authority Lifecycle Governance
Assignment, delegation, monitoring, and revocation of operational authority in autonomous decision systems. Implemented in HMAA (U.S. Provisional 63/999,105). 42-file Python package, 98 tests, TLA+ verified (23,748 states). DOI: 10.5281/zenodo.18861653.
Fail-Safe Control Recovery
Deterministic recovery protocol for authority lockout events with GREP phased recovery and terminal non-compensatory policy gate. Implemented in CARA (U.S. Provisional 64/000,170). DOI: 10.5281/zenodo.18917790.
Decision Integrity Monitoring
Hardware-anchored sensor trust computation using weighted Dempster-Shafer fusion with cross-sensor validation and adversarial dynamics. Implemented in SATA (U.S. Provisional 64/002,453). DOI: 10.5281/zenodo.18936251.
Escalation Risk Assessment
Quantitative framework for decision-time compression and escalation pathway modeling in AI-enabled command-and-control systems. Documented in the ERAM framework. Published on SSRN.
Flash War Latency Control
FLAME: deterministic latency injection middleware preventing autonomous escalation in multi-domain command environments. 5-state Circuit Breaker State Machine, Dynamic Delay Function D(A, tier, domain). Patent: U.S. Provisional 64/005,607. DOI: 10.5281/zenodo.19015618.
Multi-Agent Trust Verification
MAIVA: Byzantine-resilient swarm trust aggregation with CUSUM-augmented detection, graduated escalation, and DoDD 3000.09 action gate classification. 37 self-tests, TLA+ specification. DOI: 10.5281/zenodo.19015517.
Adversarial Deception-Aware Risk
ADARA: proactive deception prior adjusting authority based on P(adversarial). Deception Probability Engine with Bayesian update and Phantom Fleet detection. DOI: 10.5281/zenodo.19043924.
UAV Governance Platform
HMAA-UAV: authority-governed flight autonomy for contested environments integrating SATA-HMAA-CARA into a 52-component UAV with Cube Orange+ and Jetson Orin NX. 250 simulation runs across 5 adversarial scenarios. DOI: 10.5281/zenodo.19128769.
Rover Testbed Platform
Authority-governed rover implementing the full 8-stage SATA-HMAA-CARA pipeline on a 37-component dual-compute platform (RPi5 + ESP32). 350 simulation runs, 7 fault scenarios, no observed unsafe authority transitions. DOI: 10.5281/zenodo.19143190.
BLADE-EDGE Governance Node
Defense-grade edge computing platform implementing all seven governance architectures on dual-redundant Jetson AGX Orin + Zynq UltraScale+ FPGA. 72 components, 103 connections, MIL-STD-810G rated. Hardware-enforced safety interlock. ~$139K prototype BOM. DOI: 10.5281/zenodo.19177472.
BLADE-AV Governance Node
Authority-governed drive-by-wire safety architecture for autonomous vehicles. 9-module pipeline on Jetson AGX Orin + Zynq UltraScale+. Three-leg redundant KILOVAC fail-safe. 62 components, 1,200 simulation runs, no observed unsafe authority transitions. ISO 26262 ASIL-D. ~$16K BOM. Cross-domain portability demonstrated against BLADE-EDGE. DOI: 10.5281/zenodo.19232130.
BLADE-MARITIME Governance Node
Authority-governed maritime surveillance node with hydroacoustic sonar, magnetic anomaly detection (MAD), and AIS spoofing detection. Four maritime mathematical extensions: D-S fused trust, recursive AIS deception-risk, sea-state authority damping α(H), acoustic-delay-aware Byzantine consensus. 84 components, IP68 / MIL-STD-810G / MIL-STD-461G CE102. Third domain instantiation. $43K total BOM. DOI: 10.5281/zenodo.19246785.
BLADE-INFRA Governance Node
Authority-governed critical infrastructure protection node for ICS/SCADA systems, power grid monitoring, water treatment, and pipeline operations. IEC 61850 GOOSE, Modbus TCP/RTU, PROFINET IO. Pilz PNOZ S7.1 SIL-3 safety relay. 92 components, IP65, NERC CIP, FIPS 140-2 Level 3. Fourth domain instantiation. $11,590 BOM. DOI: 10.5281/zenodo.19277887.
BLADE-SPACE Governance Node
Authority-governed orbital governance node for autonomous LEO platforms beyond ground-loop latency. Microchip RTG4 FPGA + Aitech S-A1760 Venus SBC hot redundancy with <200 ms failover; ECDSA P-256 audit chain anchored in rad-tolerant TPM; three-fault-tolerant payload/thruster firing interlock; ADARA multi-constellation GNSS spoofing detection. 91 components, 6U+ SmallSat payload module, 30 krad TID, 5-year LEO mission life. Fifth domain instantiation (TRL 2-3 Preliminary Design Phase, NASA SBIR EXPAND.3.S26B aligned). $505,440 reference BOM. 15-document engineering package; Zenodo DOI 10.5281/zenodo.20183269.
BLADE-CUAS Governance Node
Authority-governed Counter-Unmanned Aircraft Systems (C-UAS) node for the post-EO 14305 multi-agency environment. Passive governance layer between commercial detection sensors and authorized operators; four-tier HMAA (T3/T2/T1/T0) federal-SLTT authority handoff; MAIVA Dempster-Shafer consensus across radar, RF, EO/IR, Remote ID, and LIDAR; ADARA Remote ID spoofing detection; ECDSA P-256 court-admissible evidence chain aligned with Fed. R. Evid. 901/902/803(6). Sixth domain instantiation (TRL 2-3 hardware / 3-4 simulation), approximately 75% architectural reuse from BLADE-EDGE. Aligned with EO 14305 and the FY26 NDAA Title LXXXVI Safer Skies Act. ~$43.5K reference BOM. DOI: 10.5281/zenodo.20299604.
BLADE-AGENT-HSM Hardware Root of Trust
Tamper-evident hardware root of trust for autonomous AI agents and the hardware companion to the AUTHREX-AGENT software shim. Signs the agent audit ledger with non-exportable ECDSA P-256/P-384 keys in an NXP EdgeLock SE051 (CC EAL6+) secure element; holds the four-tier HMAA authority state in an Infineon SLB 9670 TPM 2.0 (FIPS 140-2 Level 2) PCR bank; derives per-tool HKDF tokens; aggregates sub-agent spawn-quorum signatures; multi-modal tamper cascade (active PCB mesh, voltage-glitch, thermal) zeroizes keys and latches T0. Five-opcode 64-byte ABI; USB-A stick and M.2 Key-E module from one 4-layer PCB. Seventh BLADE platform and first hardware root of trust. Verified by an adversarial high-assurance emulator (275/275 deterministic checks, P-384 signed golden-trace anchor). Aligned with CISA/NSA/Five Eyes Careful Adoption of Agentic AI Services (1 May 2026) and FY26 NDAA Sections 1513 and 6601. ~$199 reference BOM. DOI: 10.5281/zenodo.20299821.
BLADE-SWARM Governance Node
Authority-governed coordination layer for attritable multi-agent swarms. Byzantine-fault-tolerant two-phase commit gated by SATA, HMAA, and MAIVA across N=10/50/500 agents, tolerating f=(N-1)/3 compromised agents per quorum with a quorum-intersection bound; per-node ECDSA P-256 root of trust and a hash-chained distributed audit ledger; TLA+ verified (5 safety, 3 liveness properties). Eighth BLADE platform; the multi-agent extension of the HMAA-UAV platform. Aligned with DoDD 3000.09, the FY26 NDAA, and the NIST AI RMF. ~$1,333 per-node reference BOM (TRL 3-4 simulator / spec, TRL 2 testbed). DOI: 10.5281/zenodo.20351198.
BLADE-INFRA-OT Governance Node
Authority-governed IT/OT bridge for cross-boundary OT command adjudication. Fail-closed, bump-in-the-wire governance appliance at the IT/OT segmentation boundary; AUTHREX adjudicates each cross-boundary command to propagate, hold for deliberation, or isolate across four OT authority regimes (NOMINAL, ELEVATED, LOCKDOWN, SAFE-HALT); malformed input fails closed. Xilinx Kria K26 governance plane and x86 network plane, managed Ethernet switch with SFP+ ports, ATECC608 root of trust, TPM 2.0, and a Form C fail-closed fault relay in a 1U fanless form factor; 48 BOM line items, 35 electrical, 42 mechanical connections; seed-deterministic SHA-256 tamper-evident audit ledger. Ninth BLADE platform; the operational-technology companion to BLADE-INFRA (TRL 2-3 hardware / 3-4 simulation). Aligned with NIST SP 800-82, ISA/IEC 62443, and NERC CIP. DOI: 10.5281/zenodo.20342067.
BLADE-FINANCE Governance Node
Authority governance for financial-sector AI decision systems under the U.S. Treasury Financial Services AI Risk Management Framework. A software-enforced authority-arbitration node placing a hardware-anchored checkpoint between automated transaction-decision models and consequential financial actions; an eight-stage AUTHREX pipeline routes each transaction to autonomous clearance, supervised review, elevated confirmation, or manual hold; four-tier HMAA; population-state coordination across account, device, payee, and IP-cluster history; a retrospective stigmergic swarm-review module recovers coordinated low-and-slow rings the per-transaction path clears; SHA-256 canonical-form evidence chain. Dual-plane compute (Xilinx Kria K26 governance, NVIDIA L4 inference) with a YubiHSM 2 in a FIPS 140-2 Level 3 enclosure; 36 components, approximately $9,228 BOM. Tenth BLADE platform; first in the economic-security domain (TRL 3-4 simulation / TRL 2 hardware). Aligned with the U.S. Treasury FS AI RMF, NIST AI RMF, and EO 14179. Synthetic data only. DOI: 10.5281/zenodo.20374692.
Software Authority-Governance Layer
Six software systems on the AUTHREX Systems venture site that carry the AUTHREX authority pipeline into agentic AI, OT and critical infrastructure, cyber-defense (governance only), orbital autonomy, and test and evaluation. Reference architectures (TRL 3-4), single-author research, not deployed.
Policy and National Security Research
Burak Oktenli is an independent researcher working at the intersection of AI governance, national security, and critical infrastructure resilience. His public-source analysis and governance frameworks examine how authority, accountability, and human oversight should be structured for autonomous and AI-enabled systems. His commentary has been published by RUSI and other defense outlets, his work has been cited in the United States Federal Register and in academic research, and his analysis has been featured in curated national-security reviews including United Press International's Director's Corner and the Parliamentary Observatory on AI of the Parliamentary Assembly of the Mediterranean.
Read the full Policy and National Security Research section →Research Projects

Governance Architecture Projects
Seven governance architectures forming a unified authority lifecycle framework. Each is published with a DOI on Zenodo, implemented as an interactive simulation, and connected to twelve physical research platforms: Rover Testbed (~$484), UAV Platform (~$4,200), BLADE-EDGE (~$139K), BLADE-AV (~$16K), BLADE-MARITIME (~$43K), BLADE-INFRA (~$12K), BLADE-SPACE (~$505K, TRL 2-3 Preliminary Design), BLADE-CUAS (~$43.5K, counter-UAS, TRL 2-3), BLADE-AGENT-HSM (~$199, agentic-AI hardware root of trust, TRL 2-3 silicon / 3-4 emulator), BLADE-SWARM (~$1,333/node, attritable swarm autonomy, TRL 3-4 simulator / spec), BLADE-INFRA-OT (~1U fanless, IT/OT bridge governance, TRL 2-3 hardware / 3-4 simulation), and BLADE-FINANCE (~$9,228, financial-sector AI governance, TRL 3-4 simulation / 2 hardware).
A narrated walkthrough of the runtime authority governance concept, the seven governance gates (SATA, HMAA, ADARA, MAIVA, FLAME, CARA, ERAM), graded authority, and cross-domain demonstrations, the same pipeline implemented by the architecture projects below.
Real-time authority computation engine. Four-level state machine (A3-A0) with hysteresis transitions. TLA+ verified: 23,748 states, 8 properties, of which 5 invariants and a liveness property are verified and 2 upgrade-path properties are vacuous at this bound, 98 tests.
View Project DetailsDeterministic recovery for authority lockout. Four-phase GREP pipeline (Guard, Reduce, Evaluate, Promote) with terminal non-compensatory policy gate.
View Project DetailsFoundation trust layer using weighted Dempster-Shafer belief functions. Four diagnostics: internal consistency, cross-sensor agreement, temporal stability, physical plausibility.
View Project DetailsStrategic Latency as a formal system. 5-state Circuit Breaker with Dynamic Delay Function D(A, tier, domain) preventing autonomous escalation in multi-domain command.
View Project DetailsByzantine-resilient swarm trust aggregation. Trimmed weighted median resistant to f adversaries in 3f+1 rosters, CUSUM anomaly detection, DoDD 3000.09 action gates.
View Project DetailsProactive deception prior adjusting authority via P(adversarial). Deception Probability Engine with Bayesian update. Phantom Fleet detection for AI-hallucinated hostile scenarios.
View Project DetailsEscalation risk quantification across interconnected autonomous command nodes. Models how autonomous actions cascade across domain boundaries. 6 scenarios, 600 Monte Carlo runs.
View Project DetailsProvisional patent disclosures for the governance architectures, each with application numbers, DOIs on Zenodo, source code, and an interactive simulation.
Software Research Platforms
The software authority-governance layer that the hardware platforms anchor in silicon. Published and maintained on the AUTHREX Systems venture site, where each system has a full technical page with scenarios, standards mapping, and a reference design.
Software authority-lifecycle shim for autonomous AI agents: four-tier HMAA authority gating, per-tool HKDF authorization, spawn quorum, and a hash-chained audit ledger, anchored in hardware by the BLADE-AGENT-HSM root of trust. Designed to contain indirect prompt-injection attacks against tool-using agents. Single-author research, not deployed.
View on AUTHREX SystemsThe first executable, test-backed implementation of the AUTHREX authority-governance pipeline for agentic AI. MCP-based agent tool governance, four-tier HMAA authority enforcement, human approval gating with role-based access control, signed policy loading, and a hash-chained audit ledger with verified tamper detection (forgery, reordering, deletion, and tail truncation). 85 self-generated tests passing with zero unauthorized privileged executions in synthetic scenarios; Docker build and run verified; resumable validation harness. Synthetic data only; no operational validation or agency endorsement claimed.
Repository release pending legal reviewPre-deployment authority governance for autonomous systems: assurance gating that must clear before a system is permitted to act. Reference architecture aligned with the 2026 National Cybersecurity Strategy and NDAA Section 1533. Single-author research, not deployed.
View on AUTHREX SystemsOperational-technology authority governance for critical infrastructure, gating AI actions across the IT/OT boundary. Aligned with CISA/NSA AI-in-OT principles, NIST SP 800-82, ISA/IEC 62443, and NERC CIP. Single-author research, not deployed.
View on AUTHREX SystemsAuthority governance for autonomous cyber-defense agents, constraining what a defensive AI may do and when. Governance only, with no offensive function. Aligned with Five Eyes Careful Adoption of Agentic AI Services, DARPA AIxCC, and NDAA Section 1513.
View on AUTHREX SystemsOnboard authority governance for orbital autonomy, gating autonomous spacecraft actions under intermittent ground contact. Aligned with NASA SBIR 2026 BAA subtopic EXPAND.3.S26B and Space Policy Directive 5. Single-author research, not deployed.
View on AUTHREX SystemsTest-and-evaluation authority governance: governs what an AI under evaluation is permitted to do inside the sandbox. Aligned with NDAA Section 1534 and Section 1533. Single-author research, not deployed.
View on AUTHREX SystemsAUTHREX.Systems
AUTHREX Systems is a research initiative demonstrating authority lifecycle governance infrastructure for autonomous systems. It integrates the seven governance frameworks, ten BLADE hardware platforms, and nineteen simulations developed through this research program into a single unified platform, providing end-to-end authority control across defense, maritime, infrastructure, and autonomous vehicle domains.
Standards Alignment: DoDD 3000.09 (Autonomy in Weapon Systems), NIST AI RMF 1.0 (AI Risk Management), MIL-STD-882E (System Safety), ISO 26262 ASIL-D (Automotive), IEC 61508 SIL 3 (Industrial), NERC CIP (Energy Grid), FIPS 140-2 Level 3 (Cryptographic).
Hardware Research Platforms
Twelve physical platforms implementing the governance architectures at increasing levels of operational capability. Each is published as a complete reproducible artifact package with full hardware specifications, simulation data, and assembly documentation.
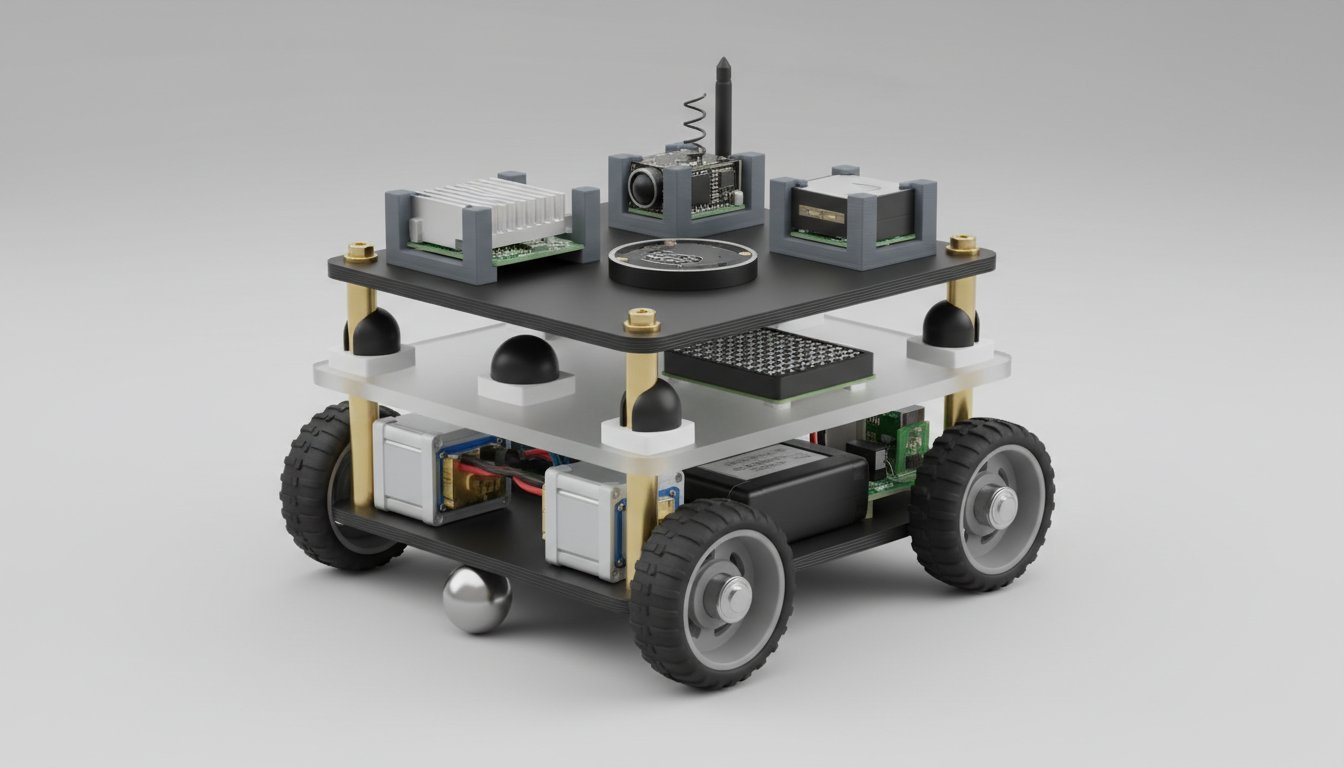
A low-cost experimental platform for studying authority-governed autonomy in safety-critical robotic systems under contested conditions. The rover continuously evaluates how much it can trust each of its sensors, computes how much authority the autonomy software should have right now, and falls back to a safe state when trust collapses. All in a dual-compute architecture (Raspberry Pi 5 + ESP32). 37 verified components, 76 electrical connections, 7 defined experiments. Platform cost under $500.
View Project Details
A trust-governed autonomous drone where every flight decision is evaluated by sensor trust fusion (SATA), authority governance (HMAA), and recovery logic (CARA). Cube Orange+ flight controller with NVIDIA Jetson Orin NX AI companion computer. 52 verified components, 48 electrical connections, 49 mechanical assemblies. Carbon fiber quadcopter frame.
View Project Details
Authority governance for attritable autonomous swarms at N=10 (physical testbed), N=50 (combined operation), and N=500 (DAWG-class). Each agent runs a Byzantine-fault-tolerant two-phase consensus gated by SATA peer trust, the four-tier HMAA authority state, and weighted MAIVA voting before the swarm commits, tolerating up to f=(N-1)/3 compromised agents per quorum with a quorum-intersection bound and safe-halt-by-default under denied or degraded RF. Per-node ECDSA P-256 root of trust (ATECC608B) feeds a hash-chained distributed audit ledger. TLA+ verified (5 safety + 3 liveness); ~$1,333 per node. It governs decision authority and audit; it does not govern weapons. Eighth domain: defense, automotive, maritime, critical infrastructure, orbital, counter-UAS, agentic AI, swarm autonomy.
View Project Details
A rugged, portable edge computing device serving as the ethical decision-making authority for autonomous defense platforms. Implements the complete 9-module governance pipeline (SATA → ADARA → IFF → HMAA → MAIVA → FLAME → CARA → BDA → EFFECTOR) on dual-redundant Jetson AGX Orin + Zynq UltraScale+ hardware. 72 components, 103 connections, MIL-STD-810G rated. Hardware-enforced safety interlock (normally-open relay). ~$139K prototype BOM.
View Project Details
Authority-governed drive-by-wire safety architecture for autonomous vehicles. 9-module governance pipeline on Jetson AGX Orin + Zynq UltraScale+. Three-leg redundant KILOVAC fail-safe relay. 62 components, 1,200 simulation runs, no observed unsafe authority transitions. ~$16,287 BOM. Cross-domain portability demonstrated against BLADE-EDGE defense variant.
View Project Details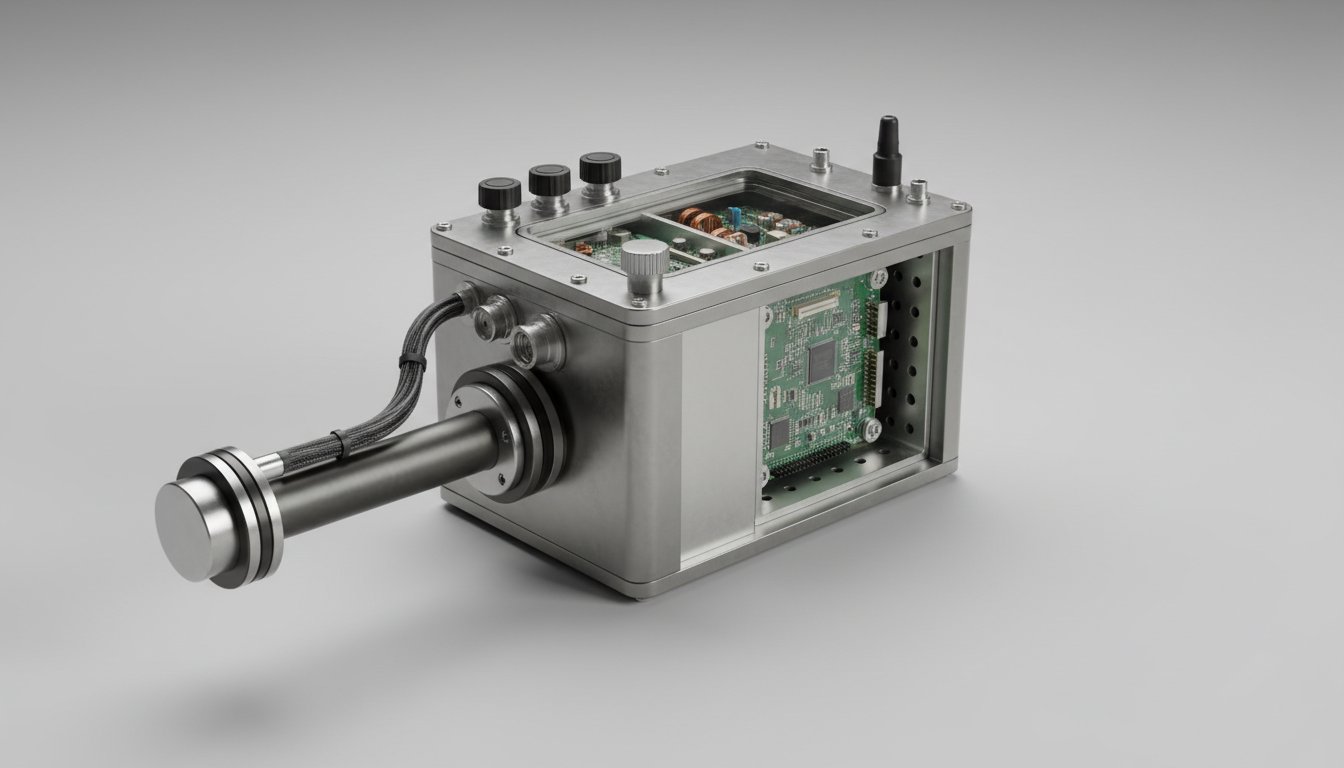
Authority-governed maritime surveillance node with hydroacoustic sonar, magnetic anomaly detection (MAD), and AIS spoofing detection. Four maritime mathematical extensions to the BLADE governance pipeline. 84 components, IP68 enclosure, MIL-STD-461G CE102 power chain. Third domain instantiation: defense → automotive → maritime.
View Project Details
Authority-governed critical infrastructure protection node for ICS/SCADA systems, power grid monitoring, and industrial process control. IEC 61850 GOOSE, Modbus TCP/RTU, PROFINET IO integration. Pilz PNOZ S7.1 SIL-3 safety relay. 92 components, IP65 DIN-rail enclosure. Fourth domain instantiation: defense → automotive → maritime → critical infrastructure.
View Project Details
A fail-closed, bump-in-the-wire governance appliance at the segmentation boundary between corporate IT networks and operational-technology control assets. Each cross-boundary command is parsed, scored, and adjudicated through the AUTHREX pipeline to one of three actions: propagate, hold for deliberation, or isolate. Four OT authority regimes; malformed input fails closed. Xilinx Kria K26 governance plane and x86 network plane, managed Ethernet switch with SFP+ ports, ATECC608 root of trust, TPM 2.0 measured boot, and a Form C fail-closed fault relay in a 1U fanless form factor (48 BOM line items). Every decision is written to a seed-deterministic SHA-256 hash-chained audit ledger. Ninth domain: the IT/OT boundary (operational technology), companion to BLADE-INFRA.
View Project Details
Authority-governed orbital governance node for autonomous LEO platforms beyond ground-loop latency. Microchip RTG4 FPGA + Aitech S-A1760 Venus SBC hot redundancy with <200 ms failover; ECDSA P-256 audit chain anchored in rad-tolerant TPM; three-fault-tolerant payload/thruster firing interlock. 91 components, 6U+ SmallSat payload module, 30 krad TID, 5-year LEO mission life. Fifth domain instantiation: defense → automotive → maritime → critical infrastructure → orbital.
View Project Details
Authority-governed Counter-Unmanned Aircraft Systems (C-UAS) node for the post-EO 14305 multi-agency environment. Passive governance layer between commercial detection sensors and authorized operators; four-tier HMAA (T3/T2/T1/T0) with federal-SLTT handoff; Dempster-Shafer multi-modal consensus through MAIVA; ECDSA P-256 court-admissible evidence chain aligned with Fed. R. Evid. 901/902/803(6). ~75% architectural reuse from BLADE-EDGE; ~$43.5K reference BOM. Sixth domain: defense, automotive, maritime, critical infrastructure, orbital, counter-UAS.
View Project Details
Tamper-evident hardware root of trust for autonomous AI agents and the hardware companion to the AUTHREX-AGENT software shim. Signs the agent audit ledger with non-exportable ECDSA P-256/P-384 keys in a CC EAL6+ secure element; holds the four-tier HMAA authority state in a TPM 2.0 PCR bank; derives per-tool HKDF tokens; multi-modal tamper cascade zeroizes keys and latches T0. Five-opcode 64-byte ABI; USB-A stick and M.2 Key-E module; ~$199 reference BOM. Verified by an adversarial high-assurance emulator (275/275 deterministic checks). Seventh domain: defense, automotive, maritime, critical infrastructure, orbital, counter-UAS, agentic AI.
View Project Details
A hardware-anchored authority layer between automated transaction-decision models and consequential financial actions. Every transaction is scored through the eight-stage AUTHREX pipeline and routed to one of four authority tiers: autonomous clearance, supervised review, elevated confirmation, or manual hold. A retrospective stigmergic swarm-review module recovers coordinated low-and-slow rings the per-transaction path clears. Aligned to the U.S. Treasury Financial Services AI RMF. First BLADE platform in the economic-security domain. Synthetic data only; not deployed in any financial institution.
View Project DetailsInteractive Technical
Demonstrations
Fully functional, browser-based implementations that execute the actual published algorithms with real-time computation and verifiable outputs, not mockups.
Problem, Solution, Impact
The unified framework · seven architectures across the BLADE platforms, click to expand
All architectures presented in this work are components of a unified authority-governed autonomy framework. SATA evaluates system trust, HMAA computes authority constraints, CARA enforces recovery behavior, MAIVA governs multi-agent participation, FLAME regulates decision timing, ADARA detects adversarial deception, and ERAM quantifies escalation risk in command-and-control environments. Together, these components form a structured approach to controlling autonomous systems under uncertainty. The BLADE-EDGE Governance Node implements all seven architectures in a single defense-grade device, and the BLADE-AV Governance Node demonstrates automotive portability under ISO 26262, and the BLADE-MARITIME Governance Node extends the pipeline to maritime surveillance under MIL-STD-810G, and the BLADE-INFRA Governance Node extends it to critical infrastructure protection under SIL 3 / NERC CIP, and the BLADE-SPACE Governance Node extends it to the orbital domain (TRL 2-3 Preliminary Design Phase) with radiation-tolerant compute and ECDSA-anchored audit, aligned with NASA SBIR EXPAND. The BLADE-CUAS Governance Node extends it to the counter-UAS domain, arbitrating federal-SLTT authority for Counter-Unmanned Aircraft Systems operations under EO 14305 and the FY26 NDAA Safer Skies Act. The BLADE-AGENT-HSM extracts the trust anchor into a standalone tamper-evident device, the hardware companion to the AUTHREX-AGENT software shim, extending the same hardware-rooted authority and audit chain to autonomous AI agents under the CISA/NSA/Five Eyes agentic-AI guidance and FY26 NDAA Sections 1513 and 6601. The BLADE-SWARM Governance Node extends the pipeline to coordinated multi-agent swarms, gating every swarm commit on Byzantine-fault-tolerant sub-quorum consensus (SATA, HMAA, MAIVA) across N=10/50/500 attritable agents with a hash-chained distributed audit ledger, aligned with DoDD 3000.09 and the FY26 NDAA. The BLADE-INFRA-OT Governance Node extends the pipeline to the IT/OT boundary, adjudicating each cross-boundary command at the segmentation seam between corporate IT networks and operational-technology control assets, failing closed on malformed input, aligned with NIST SP 800-82, ISA/IEC 62443, and NERC CIP.
Future Research Directions
Exploratory directions under consideration. Neither has been built, simulated, or published, and neither is part of the current portfolio.
The AUTHREX authority-governance model is designed to generalize across safety-critical domains beyond those already instantiated. Two public-interest directions are under consideration:
Medical-device AI governance (working name BLADE-MED-DEVICE). Applying authority arbitration to AI/ML-enabled medical devices, framed against the U.S. FDA Software-as-a-Medical-Device Action Plan and Predetermined Change Control Plan (PCCP) pathway, FDA premarket cybersecurity guidance, IEC 62304, and ISO 13485.
Rail autonomous-control authority (working name BLADE-RAIL). Extending the model to rail and transit control, framed against FRA Positive Train Control, CBTC standards (IEEE 1474, IEC 62290), and the Transportation Systems critical-infrastructure sector.
Technology readiness levels, terminology, and dual-use mapping
Research Papers
& Policy Analysis
40 DOI-registered research works across Zenodo and SSRN covering autonomous systems governance, AI defense doctrine, escalation risk, authority lifecycle architecture, and quantum-communications governance. All publications are open-access and verifiable via DOI or SSRN abstract IDs.
Distribution: 16 SSRN scholarly papers (Author Rank 14,528 of 2,808,007, top 0.52%), 24 Zenodo DOI deposits (Georgetown University institutional affiliation). Topics span autonomous systems governance, AI defense doctrine, escalation risk in AI-enabled military command and control, authority lifecycle governance, autonomous space operations, quantum-communications governance, and counter-tunnel architectures.
Published Commentary · 12 pieces, click to expand
Authority & Architecture Imprint
Three-trilogy / 10-volume technical reference series on autonomous-systems authority architecture: The Authority Equation (3 volumes), The Authority Discipline (4 volumes), and Autonomous Authority (3 volumes). Distributed via Amazon and IngramSpark in print and ebook formats. ISBNs registered through Bowker; The Authority Equation Volume I assigned Library of Congress Control Number 2026912260.
View Full Catalog at Authority & ArchitectureCredentials & Background
Independently verifiable evidence of patents, publications, institutional affiliation, and professional experience. Every claim can be cross-checked through external systems: USPTO Patent Center, Zenodo, ORCID, Google Scholar, SSRN, ResearchGate, and employment records.
Verification Sources: Georgetown University M.P.S. Applied Intelligence (STEM) · Lynn University MBA (GPA 4.0) · USF B.Sc. Computer Science Engineering (STEM) · USPTO Patent Center · Zenodo · ORCID #0009-0001-8573-1667 · Google Scholar · SSRN · ResearchGate · Blue.Cloud · 7 professional roles 2017-Present.
Research & Publication Presence
ORCID
0009-0001-8573-1667, Verified researcher identity with Georgetown University affiliation
Google Scholar
Full publication index with citations and research metrics
SSRN
Policy and strategic research papers on AI governance, escalation risk, and national security
ResearchGate
Research profile with publications, metrics, and academic networking
Zenodo
24 DOI-registered research artifacts with Georgetown University affiliation (CC BY 4.0)
OpenReview
Open peer review platform for AI and machine learning research
GitHub
Source code repositories for AUTHREX governance architectures and research platforms
GitLab
Mirror repositories and CI/CD pipelines for governance architecture research
Professional network profile with career history and research connections
Get In Touch
Available for research collaborations, expert advisory engagements, and discussions on AI governance, autonomous systems safety, and national security technology policy.
Washington, DC
English (Professional) · Turkish (Native) · Russian (Reading Proficiency)
AI Governance · Autonomous Systems Safety · National Security Technology · Escalation Risk Modeling · Human-Machine Teaming
HMAA: U.S. Provisional 63/999,105 (March 7, 2026) · CARA: U.S. Provisional 64/000,170 (March 9, 2026) · SATA: U.S. Provisional 64/002,453 (March 11, 2026) · FLAME: U.S. Provisional 64/005,607 (March 14, 2026) · ADARA: U.S. Provisional 64/110,218 (July 13, 2026) · MAIVA: U.S. Provisional 64/110,221 (July 13, 2026) · ERAM: U.S. Provisional 64/110,225 (July 13, 2026) · All seven filed via USPTO Patent Center