BLADE-SWARM Governance Node
BLADE-SWARM = Beam-Layer Authority for Directed Engagements, Swarm Node
A reference architecture and N=10 physical testbed that governs decision authority and audit across an attritable autonomous swarm. Each agent runs a Byzantine-fault-tolerant two-phase consensus, gated by computed peer trust (SATA), authority tier (HMAA), and weighted multi-agent voting (MAIVA), before the swarm commits to a coordinated action. The architecture is parameterised over N = 10 (physical testbed baseline), N = 50 (small-scale combined operation), and N = 500 (DAWG-class). It governs decision authority and audit; it does not govern weapons.
Reference Architecture (TRL 3-4 simulator and formal spec; TRL 2 testbed design) · Eighth BLADE Platform · DOI 10.5281/zenodo.20351198This is NOT a weapon and not a swarm-control autopilot. It is an authority-gating governance layer that sits between the swarm autonomy stack and any coordinated action, computing peer trust, authority tier, and a tamper-evident distributed audit ledger. It tolerates up to f = (N-1)/3 compromised agents per quorum and defaults to a safe halt under denied or degraded radio-frequency conditions.
Key Contributions
- Eighth BLADE platform, and the first to extend the AUTHREX authority pipeline from a single governed node to a decentralized multi-agent swarm, the eighth governance domain
- Byzantine-fault-tolerant two-phase consensus, refining MAIVA with sub-quorum decomposition that tolerates up to f = (N-1)/3 compromised agents per quorum with a quorum-intersection safety bound
- Authority gating before commit: every coordinated action is gated by SATA peer trust, the four-tier HMAA authority state, and weighted MAIVA voting, with safe-halt-by-default under denied or degraded radio-frequency conditions
- Per-node ECDSA P-256 root of trust on a Microchip ATECC608B secure element (private key never leaves the chip), feeding a hash-chained distributed audit ledger gossiped across the mesh
- FLAME deliberation-window contraction and tier-downgrade asymmetry tuned for contested-RF and electronic-warfare resilience, with Sybil resistance via attested per-node identity
- Scale-parameterised across N = 10 (physical testbed), N = 50 (combined operation), and N = 500 (DAWG-class) in a single discrete-event browser simulator with five scripted scenarios
- TLA+ formal specification with five safety invariants and three liveness properties, model-checked on a reduced-scale instance; refines the AUTHREX_MAIVA module
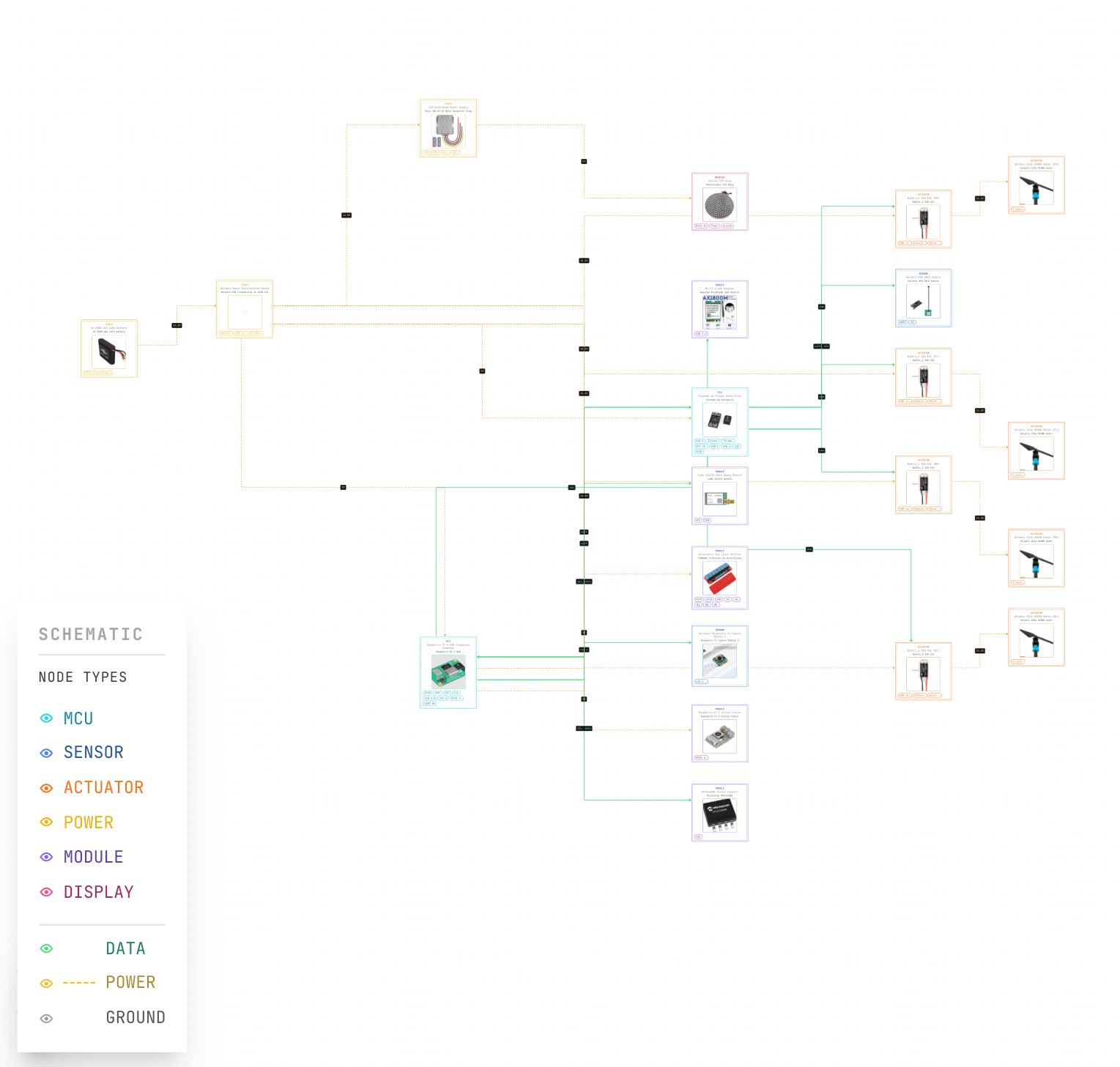
- COTS-only reference hardware: approximately $1,333 per node (Pixhawk 6X + Raspberry Pi 5 + LoRa SX1276 mesh radio + ATECC608B), approximately $13.3K for the N=10 testbed baseline. Governs decision authority and audit; it does not govern weapons.